
Matt Ferraro
I'm an aerospace engineer and a software engineer. I love math and science, and I have two cats.
I write articles here and I occasionally post on Twitter.
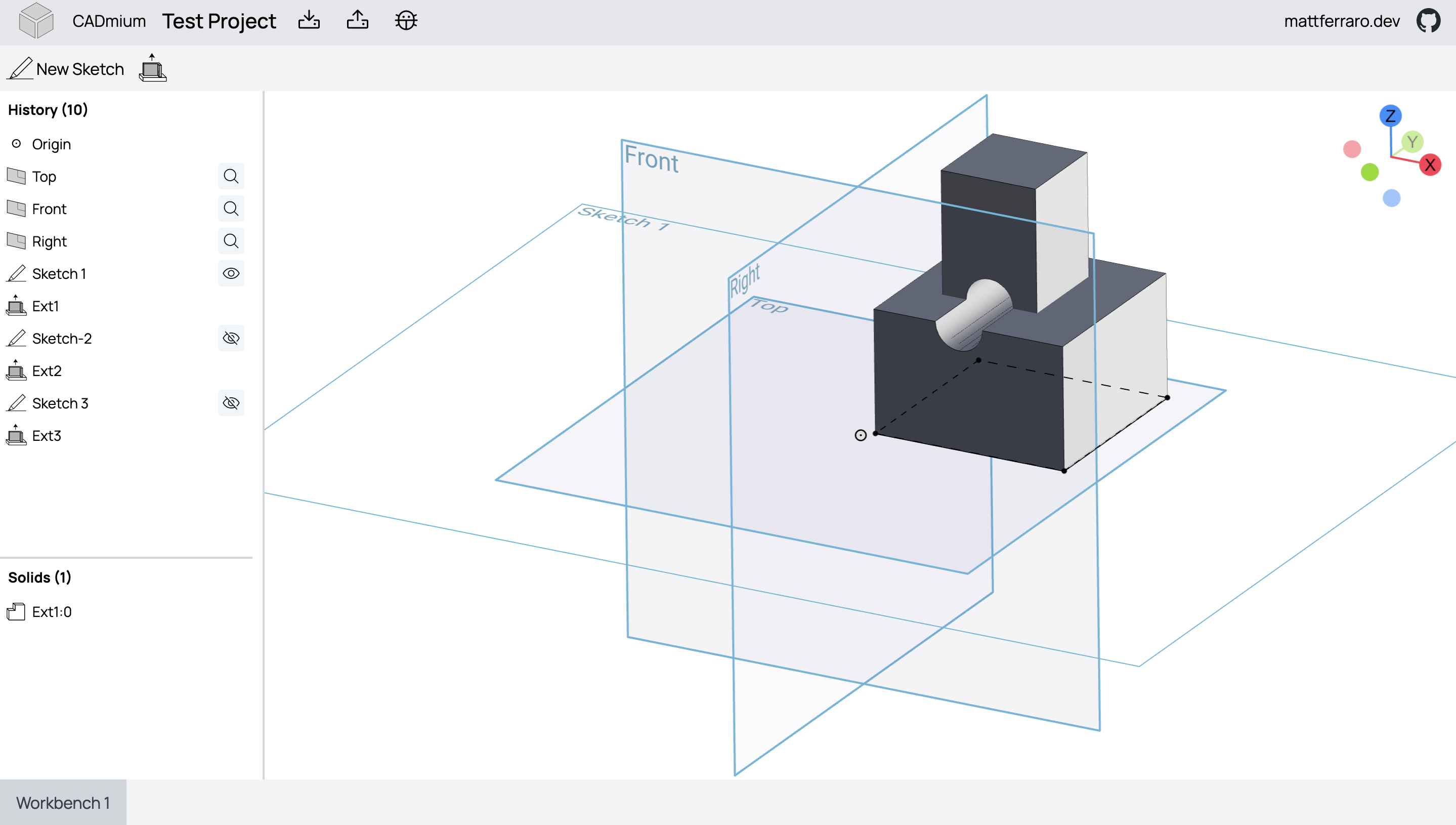

Continuous Integration for CAD
March 11, 2024

What Is the Inverse of a Circle?
January 29, 2022

The Joule-Thomson Effect and The Models We Know
December 16, 2021

What is the Inverse of a Vector?
November 1, 2021
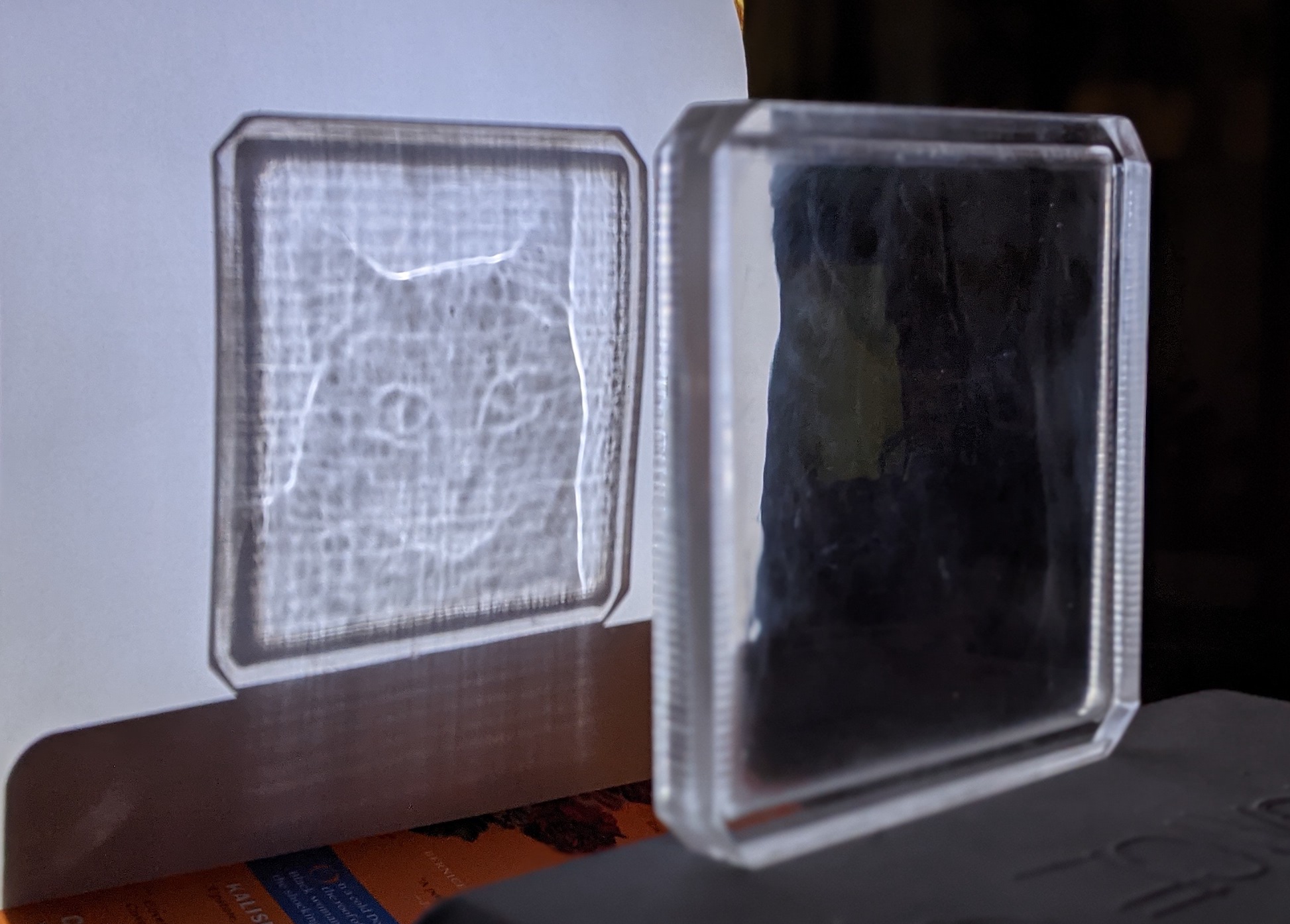
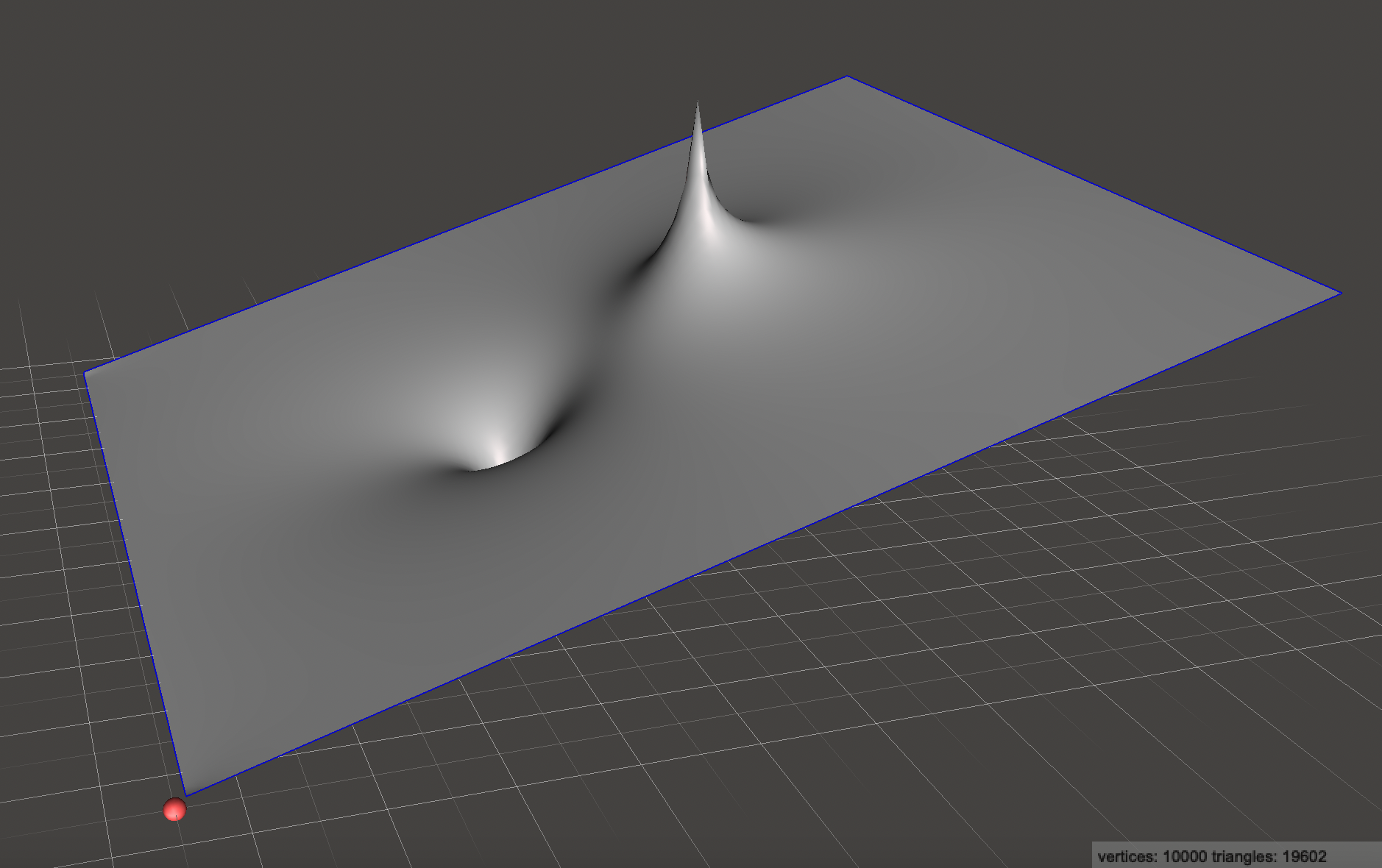
Hiding Images in Plain Sight: The Physics Of Magic Windows
August 18, 2021

Anatomy of a CNC Router
January 17, 2021